Smart 與 PinToo 利用 Modbus TCP 工業通訊協定,模擬控制自動化工廠
八
10
八
10
Smart 物聯網應用軟體開發精靈,平移式機械臂實例 (社區版非商業用途免費),主要學習目的。 使用 Modbus TCP 通訊協定,利用網路傳送指令給 Arduino mega2560 開發板使用開源的 Modbus TCP 程式庫,串接 Arduino mega2560、CNC Shield V3、A4988,並以此控制 42 步進馬達。連接電腦上的攝像頭,直接拍攝平移式機械臂,即時運動影像。 實例以最簡單的方式呈現,朋友們以此擴展發揮,即能做出更專業的運用。 平移式機械臂,Smat源碼、零件線路圖 Fritzing、Arduino 程式、所有外殼 3D印製圖檔 stl,全部上傳至 GitHub,需要的朋友請自行下載。下載網址︰https://github.com/.../s-eq-...
八
10
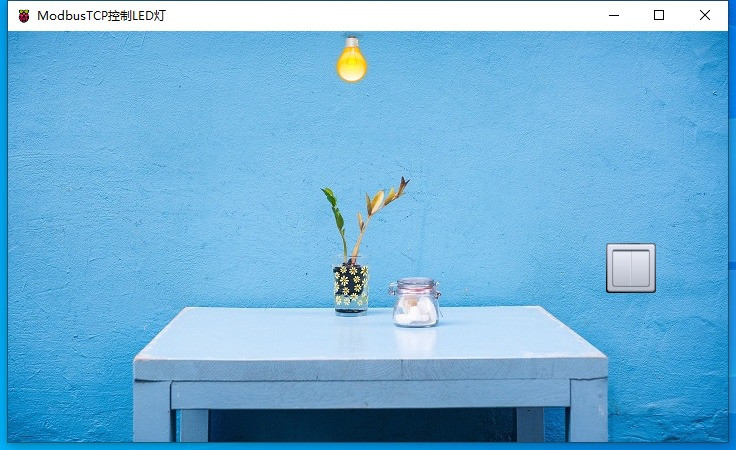
範例說明 採用 Modbus TCP 通訊協議,控制駁接在 Arduino 上的 LED燈。Modbus TCP使用電腦來指定特定 IP 地址下的Modbus TCP從機,從而控制該從機。範例中使用 Arduino 開發板與 Ethernet W5100 網路擴充套件板,組合稱 Modbus TCP 從機。其工作方式如下: PC 裝置(Modbus TCP主機)通過 Modbus TCP 通訊協議傳送指令給指定的 IP 地址,該地址下對應一個 Modbus TCP 從機,要求打開連線該從機的 LED燈,從機收到主機指令後會自動解碼,接著完成ModbusTCP 主機所指派的工作,開啟 LED 燈。 範例中 LED 燈正極(針腳較長的一端)連線到電阻,再連線到Ethernet W51...