
智慧攝影機滑軌―持續更新中 Smart 使用WebSocket 通訊協定,控制各種照相機滑軌,照相機滑軌使用 35或42步進馬達驅動,使用ESP32開發板。左右移動上方攝影機圖像,滑軌也會同步移動。攝影機可以使用手機或ESP32-CAM。 感謝 露天商家提供此滑軌 3D列印 2020鋁合金30公分5V28BYJ-48電動滑軌https://www.ruten.com.tw/item/show?21818975731787 每日更新,會提供所有源碼,敬請關注。
八
10
八
10
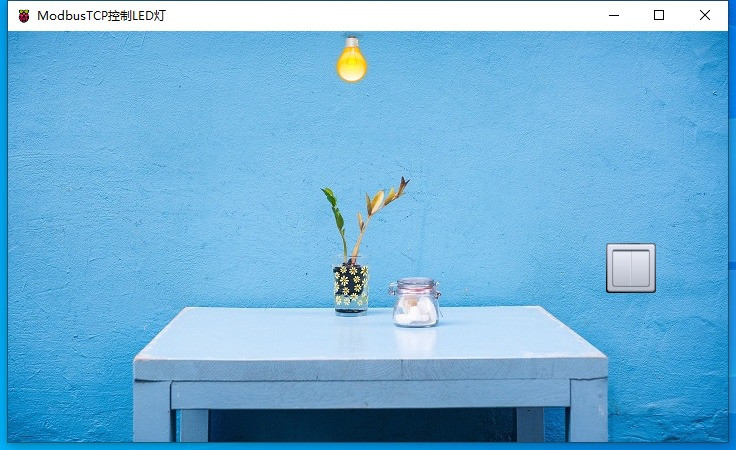
範例說明 採用 Modbus TCP 通訊協議,控制駁接在 Arduino 上的 LED燈。Modbus TCP使用電腦來指定特定 IP 地址下的Modbus TCP從機,從而控制該從機。範例中使用 Arduino 開發板與 Ethernet W5100 網路擴充套件板,組合稱 Modbus TCP 從機。其工作方式如下: PC 裝置(Modbus TCP主機)通過 Modbus TCP 通訊協議傳送指令給指定的 IP 地址,該地址下對應一個 Modbus TCP 從機,要求打開連線該從機的 LED燈,從機收到主機指令後會自動解碼,接著完成ModbusTCP 主機所指派的工作,開啟 LED 燈。 範例中 LED 燈正極(針腳較長的一端)連線到電阻,再連線到Ethernet W51...
八
10
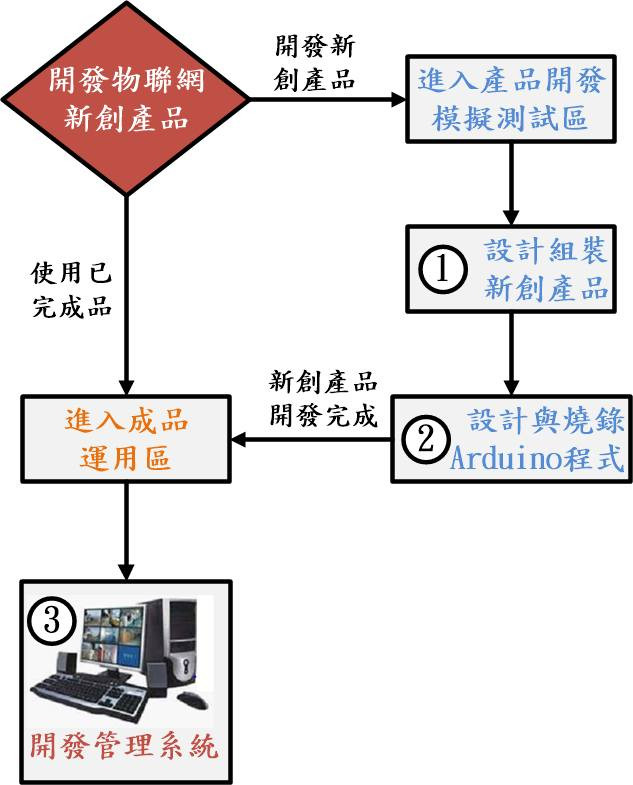
採用以下三個步驟進行開發工作: 產品開發模擬測試區,將Arduino、ESP32開發板與感測器,組裝成物聯網裝置。電腦連接組裝完成的物聯網裝置,設計並燒錄Arduino開發板程式。在成品運用區使用Smart,連接(Arduino、ESP32、機電設備),設計監控軟體,與資料庫存儲工作。 產品設備要從無到有,先後進入產品開發模擬測試區與成品運用區,把機電產品與管理軟體一併開發出來,這三個步驟是必要的流程。如果使用供應商提供的機電成品,直接進入成品運用區,只需第3步驟。 以開發機械手臂為例來說明:步驟1:將所有電子與機械零件,組裝成機械手臂。此時機械手臂之開發板尚未燒綠程式,所以無法接收指令進行任何操作。步驟2:設計Arduino程式完成後,燒錄至開發板。此時機械手臂已經是成品,可以接受...
八
10

Smart 物聯網應用軟體開發精靈,設計在車牌、車型、文字的辨識功能(社區版非商業用途免費)
八
10
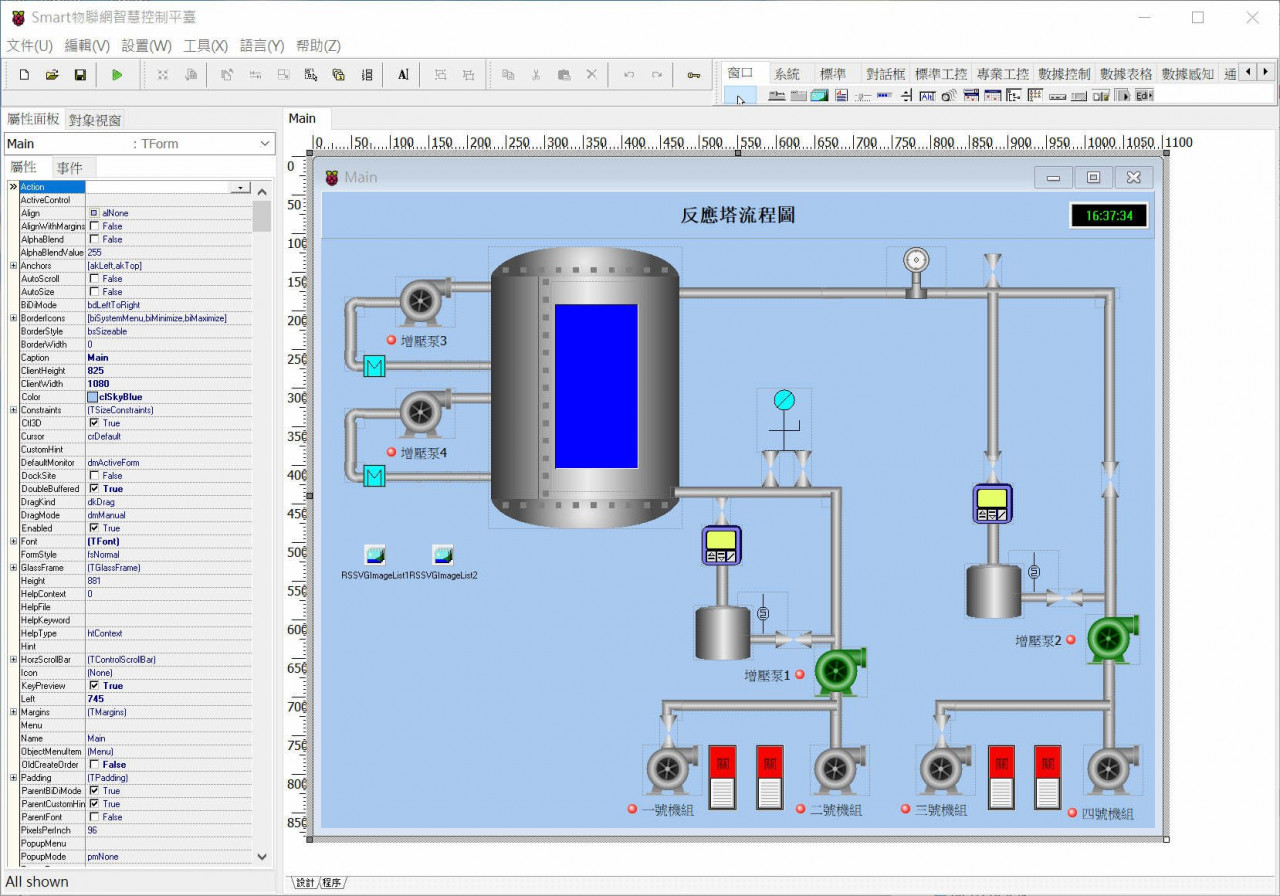
Smart 物聯網應用軟體開發精靈,在工廠監控 Scada 的運用(社區版非商業用途免費)
八
10
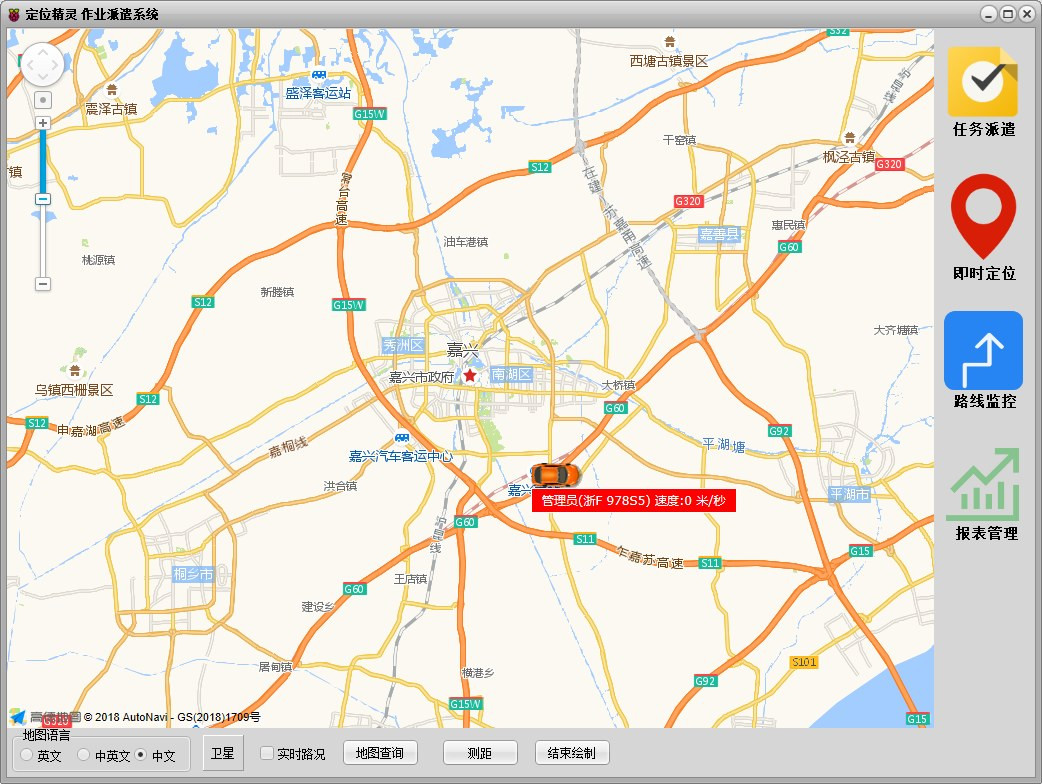
Smart物聯網應用軟體開發精靈,製作企業車輛定位系統(社區版非商業用途免費) 請大家幫忙傳送或分享貼文,越多人用越好,大家互相學習討論。讓 Smart 運用之路更寬廣。 定位系統需搭配手機或ESP32+GPS,主要分為移動端與Windows後台管理兩部份。 移動端包括:任務執行、定位回傳、情況彙報等功能;如果搭配ESP32只能上傳定位訊息。 Windows後台管理包括:任務派遣、即時定位、路線監控、報表管理四大核心功能。貼圖內容為簡體字不影響在繁體作業系統下之運行功能。 主要功能︰ ●不須額外設備,手機平板即可安裝。 ●安裝簡易,只需下載APP,管理簡便。 ●可跟人或跟車,可隨意變換。 ●查詢客戶、廠商資料與相關區域圖資。 ●支援影像傳輸,各式條碼掃描。 ●支援車上...
八
10
八
10
八
10
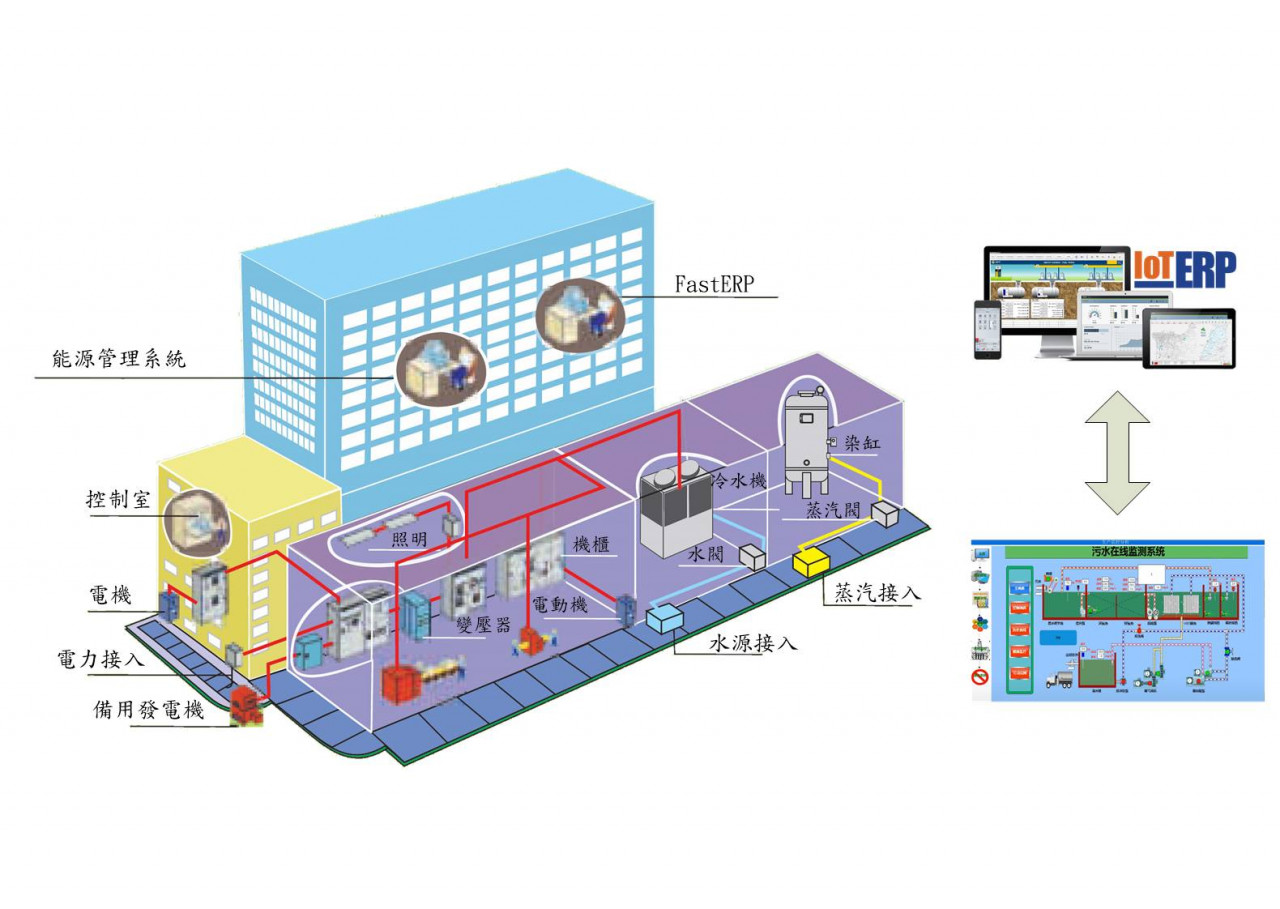
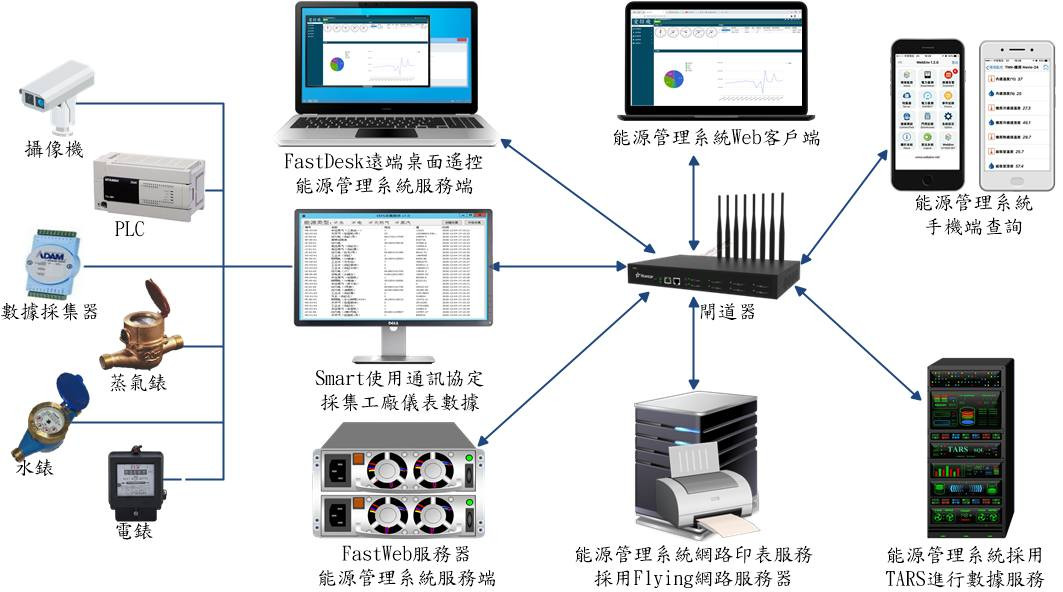
Smart是物聯網應用軟體開發精靈,Windows平臺的開發工具(社區版非商業用途免費) Smart是Windows平臺的開發工具、資料採集與監控系統。提供多層次開發框架,快速開發企業管理系統,只要有網路,無論何時、何地,都可以自行開發、快速的工作。從系統設計、雛型設計到系統開發,最後到版本管理與佈署一氣呵成,顛覆軟體設計工作模式,並提供全新服務。Smart專為Windows平臺設計的圖像化編程工具。以您為中心,量身打造Smart各種商業運用與物聯網的整合。無論在工廠監控、ERP、電子商務…,就讓Smart滿足您的想像。 適用於自動化設備動態圖形顯示和即時資料掌控。Smart在各行業廣泛的應用,包括航太航空、軍工、汽車、農業、能源、電源管控、樓宇管理、一般製造工廠、礦山、食品和飲...
八
10
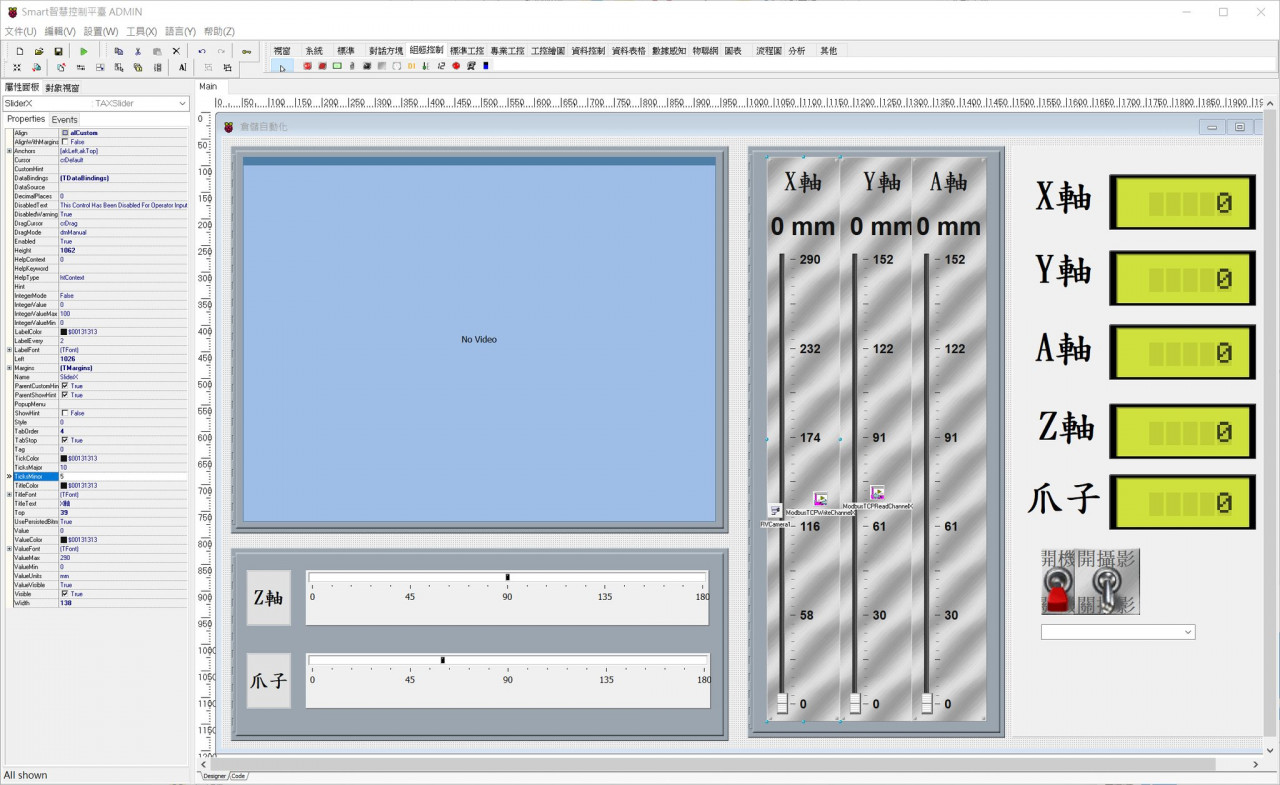
Smart 物聯網應用軟體開發精靈,連接攝像頭,監視並任意控制機械臂(社區版非商業用途免費) 一、控制重點 控制 3D印表機,所印製的移動抓取手臂連接攝像頭,即時監控機械手臂的一舉一動前後是 X軸、上下是 Y軸,採用3D印表機開源配件旋轉是 Z軸與爪子,套用機械手臂開源配件。 二、使用控制設備 Arduino UNO 開發板、也可改用 ESP32乙太網路 W5100 擴展板A4988 驅動器與 CNC Chield擴展板高扭力 42步進馬達羅技 C270i 攝像頭。 三、使用工業通訊協定 Modbus TCP,可換用 Modbus RTU、OPC UA、MQTT、RestAPI、WebSocket。 四、使用開發軟體 Smart物聯網的精靈。