功能介紹
功能介紹
# 功能介紹
以下將主要介紹界面中各模組、欄位代表的含義與功能。對於報表圖表,還將介紹各圖表表示的含義,以及計算的方法等資訊。
# 1. PID基本資料
關於設備等數控中心的基礎數據的設定請閱讀數控數據。
# 2. PID趨勢圖
PID趨勢圖顯示實時的PID控制資訊,左側顯示目前實時的控制參數資訊。使用者可以自行設定其他的控制參數,右側的控制數據資訊也會同步更新。
以圖中的示例進行說明,如果需要設定特定的參數值,需要自行修改設定值、Kp、Ki、Kd,點選 [設定] 后可以更新參數。
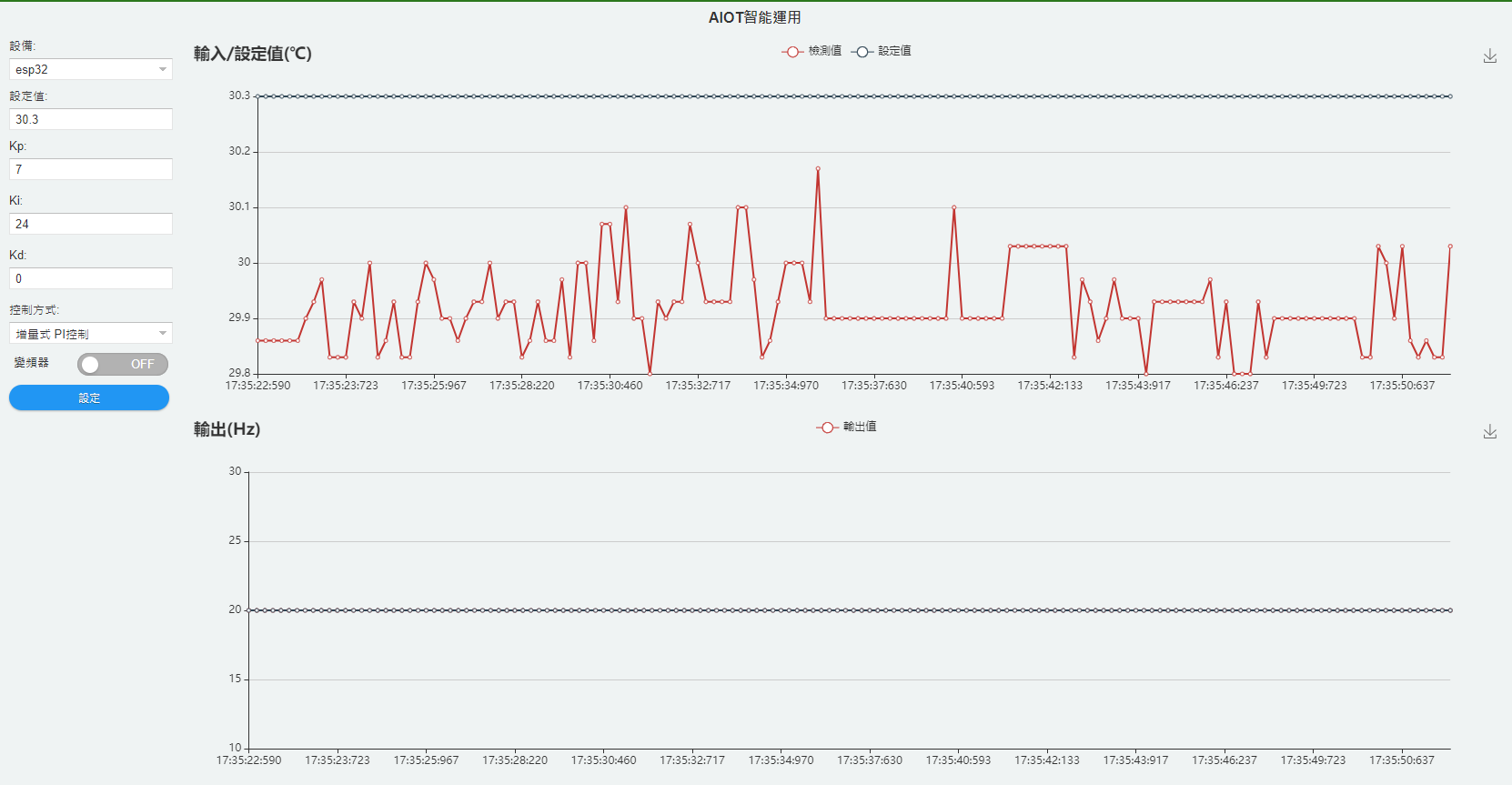
圖中顯示有兩種控制方式,以下針對兩種控制方式分別作說明。
位置式PID控制:控制器的輸出是系統的當前狀態與期望狀態之間的差值(誤差)。這意味著控制器的輸出直接控制系統的位置、角度、溫度等物理量,而不是速度或增量。位置式PID控制器是最常見的PID控制形式,適用於大多數應用,尤其是對於需要直接控制物理過程的情況。
增量式PID控制:控制器的輸出是系統目前時刻的控制變數與上一個時刻的控制變數之間的差值,而不是直接控制系統的位置或狀態。因此,輸出是一個增量值,通常用於調整系統的控制變數(如閥門開度或馬達的速度增量)。增量式PID控制器對於一些特殊應用具有優勢,特別是需要避免積分分離問題(Integral Windup)的情況。積分分離是指積分項累積過多誤差,導致系統的超調或不穩定。
選擇位置式PID控制器或增量式PID控制器取決於具體的應用和系統需求。位置式PID控制器通常更常見,而增量式PID控制器在某些情況下可能更有用,特別是在需要避免積分分離問題或者需要對增量進行更精確控制的情況。
# 3. PID歷史記錄
PID歷史記錄用於查詢過去PID控制器的歷史控制記錄,可自行選擇特定的參數值與設定值查詢PID控制器的輸入、輸出情況。

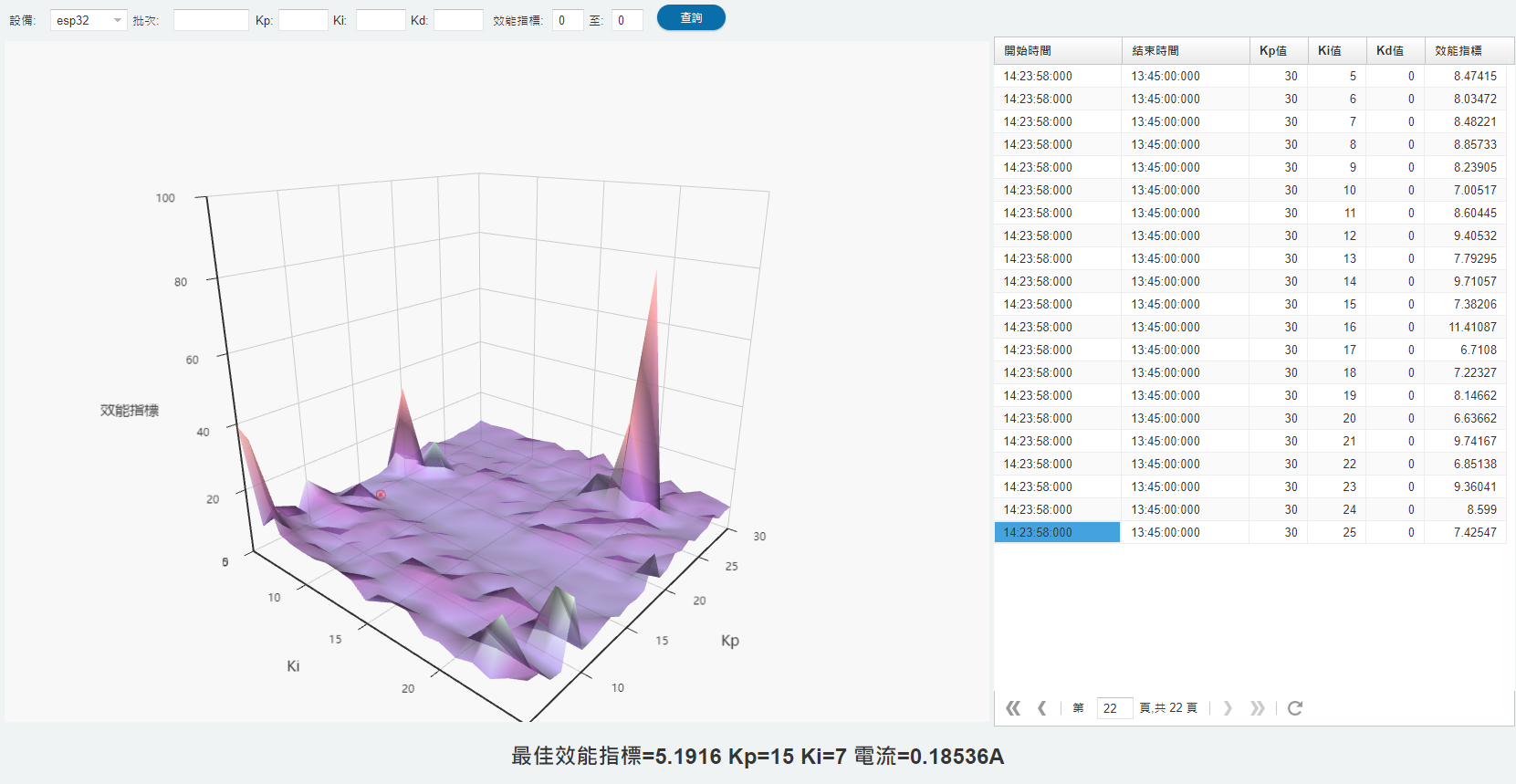
# 4. 效能指標分析
效能指標是一個與設備的電流、控制值與實際值的誤差正相關的數據,它應當是一個大於0的數據,用來表示PID控制器的穩定性與節能程度的指標。當效能指標數據越小時,表示目前運行狀態下設備更節能,PID控制器更穩定。
# 5. 誤差分析
誤差分析與 效能指標分析 相比,去除了設備電流部分的數據,僅關注誤差的部分。它應當是一個大於0的數據,用來表示PID控制器的穩定性。當效能指標數據越小時,表示目前運行狀態下PID控制器更穩定。

# 6. 誤差累計預測分析
誤差累計預測分析圖是將參數取值的變數控制到1個,觀察這個變數與誤差累計之間的變化關係。這種觀察方式將三維圖形平面化處理,能更精細化觀察趨勢。如果圖中發現誤差累計數據隨著觀察變數的增加出現了先減少后怎加的情況,說明在中間的某個取值能讓誤差做到相對較小,在這個取值範圍內的PID控制器能做到相對的穩定,這是採用人工分析的方法實現的。

# 7. PID智能分析助手
PID智能分析助手是模型訓練嚮導,用來指導訓練產生最佳效益分析模型的模組。
在數據準備環節,界面中會顯示所有符合要求的數據,可以自行設定置信度與效能權重。置信度反映的是產生的效能指標在統計範圍中位數區間的偏離程度,超過這個偏離程度的數據會被視為無效數據捨棄。效能權重用來平衡電流指標與誤差指標。如果在實際運用中更注重節能,則效能權重應當設定小於1的數值;如果更注重PID控制器的穩定性,則設定效能權重應當大於1,根據重視程式調整,如果特別重視誤差的話,則應調整效能權重至少大於100。調整完成後,點選 [更新整定標準數據]。這些選擇的數據會被更新新的效能指標數據。

在驗證訓練環節。可自行調整模型訓練的參數資訊。可修改訓練的參數,點選 [更新預測模型] 開始執行模型訓練,訓練完成後,可看到訓練的記錄,同時載入新的模型。
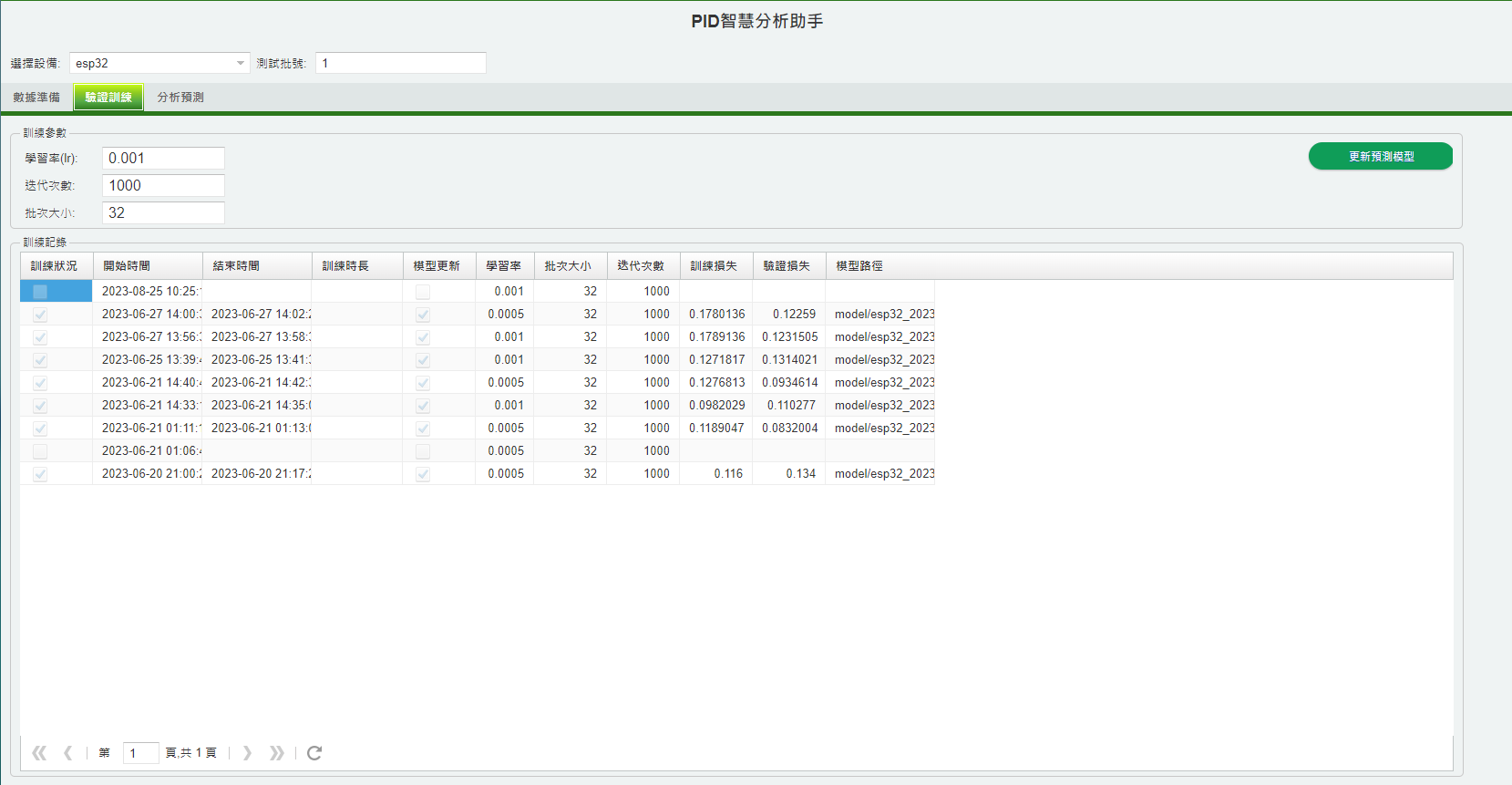
表中的欄位說明如下:
- 訓練狀況:是否訓練完成。
- 模型路徑:訓練完成的模型所在的路徑。
- 開始時間:訓練模型的起始時間。
- 結束時間:訓練模型的結束時間。
- 模型更新:是否產生了新的模型。
- 學習率:模型訓練時,更新模型參數的梯度數值。
- 批次大小:訓練的數據批次的數量。
- 迭代次數:訓練完整批次數據的次數。
- 訓練損失:訓練完成的模型驗證訓練集(用於模型訓練的數據集)的結果的均方差值。用於反映模型預測結果與實際結果的偏差值,這個數值應越小越好。
- 驗證損失:訓練完成的模型驗證驗證數據集(未參與模型訓練的數據集)結果的均方差值。用於反映模型預測結果與實際結果的偏差值,這個數值越小越好。
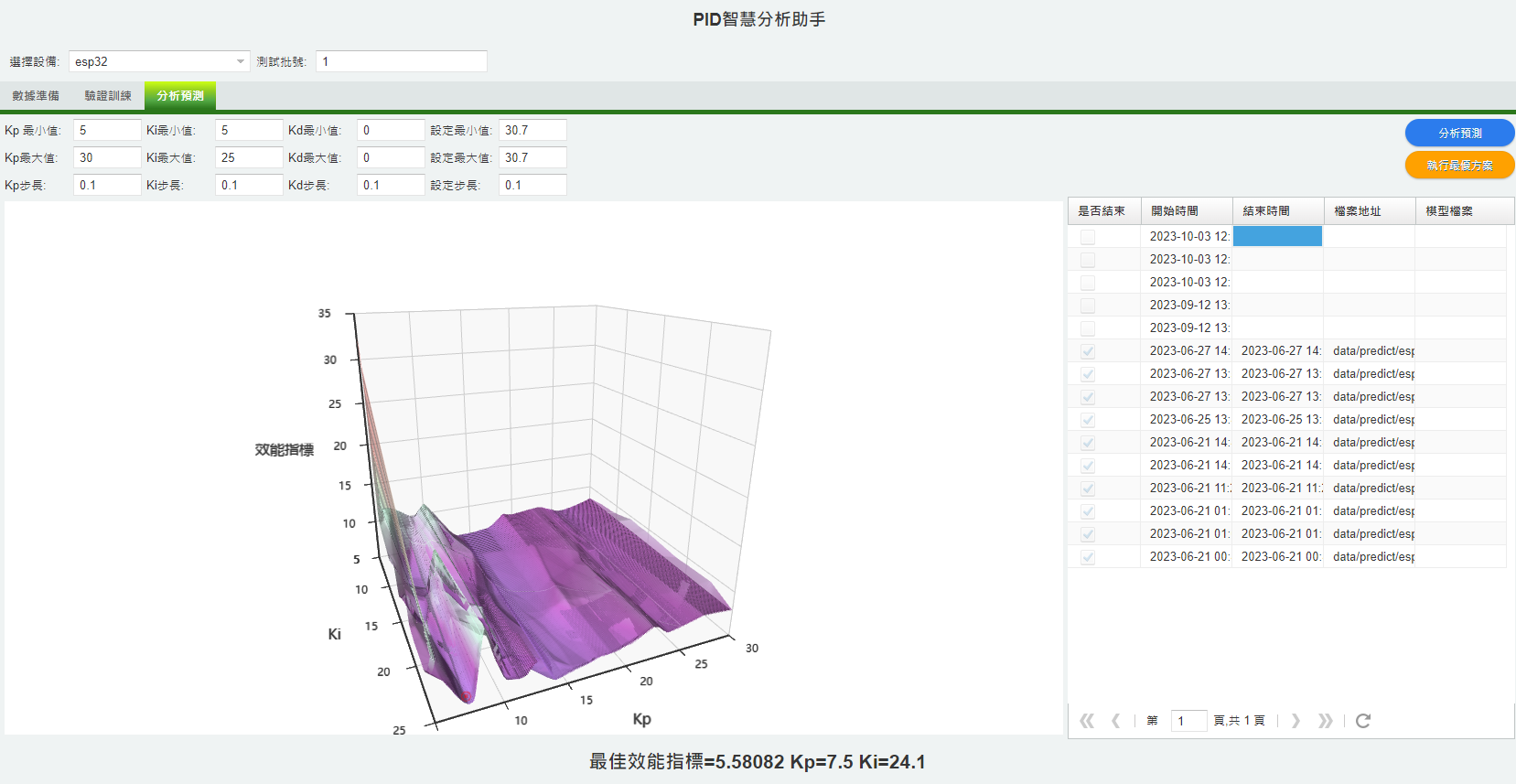
在分析預測環節,可自行指定模型要預測的參數區間範圍,點選 [分析預測],模型會根據選定的範圍進行效能指標的預測分析,並以三維圖表的方式展示這些預測的結果。同時圖表中會標註效能指標最小值所在的位置,底部會同時顯示最佳效能指標對應的參數,可將這套參數運用至當前運行的設備上。